goldenbird
An optimized Arduino line follower that uses port manipulation for fast performance. It is a 10x-20x faster than the ordinary Arduino powered PID controlled bot. The size is reduced by \~60% as compared to other files.
Port Manipulation
As we know Arduino is an 8-bit processor. We can use an 8-bit line to read and write data to/from its bus. TO do that we use microprocessor register DDRx for Data direction register for I/O. PORTn for reading and writing data.
pinMode(A0, INPUT);
pinMode(A1, INPUT);
pinMode(A2, INPUT);
pinMode(A3, INPUT);
pinMode(A4, INPUT);
pinMode(A5, INPUT);
To write this at once, first, we need to know the pin mapping of ATmega328P or ATmega2560
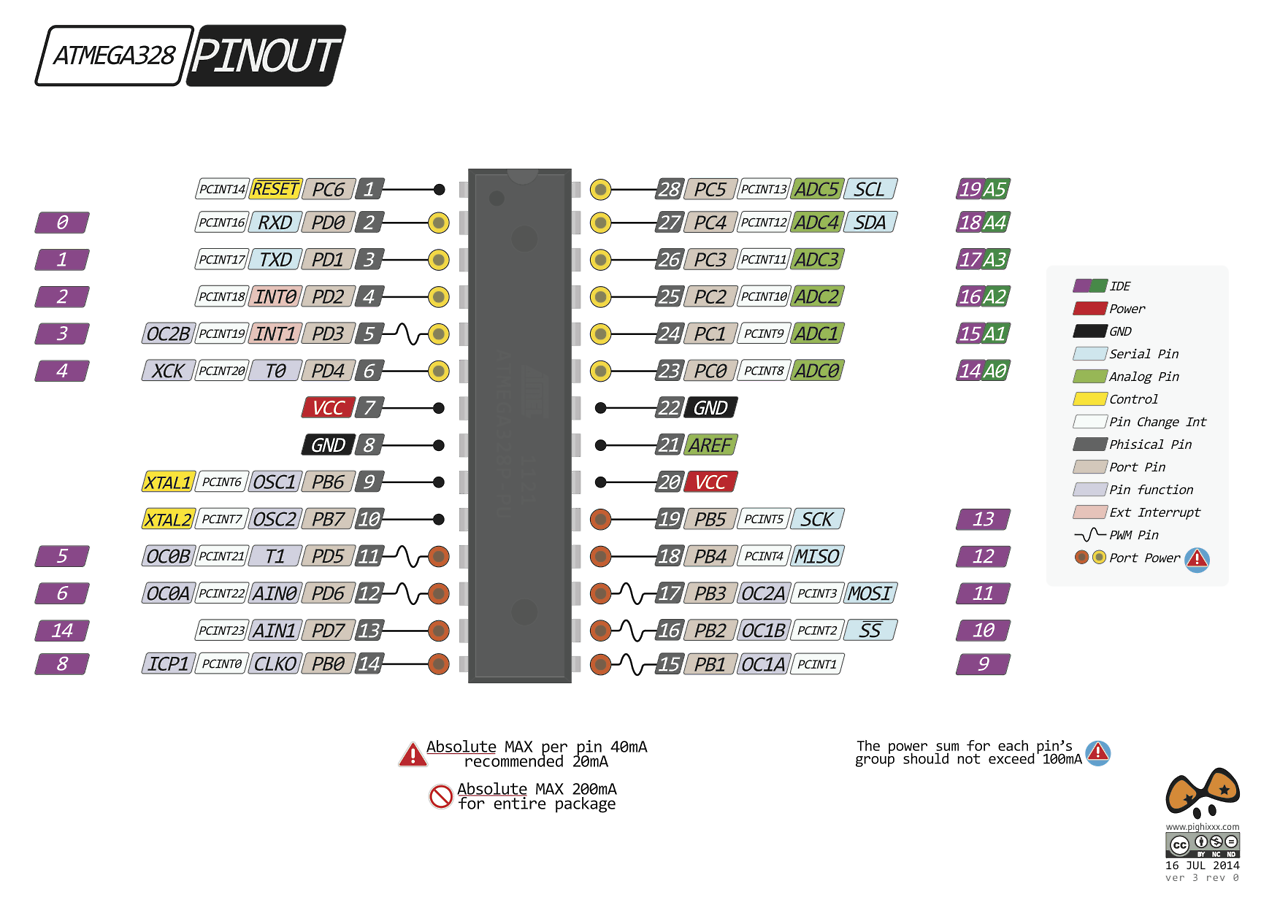{kind=link}
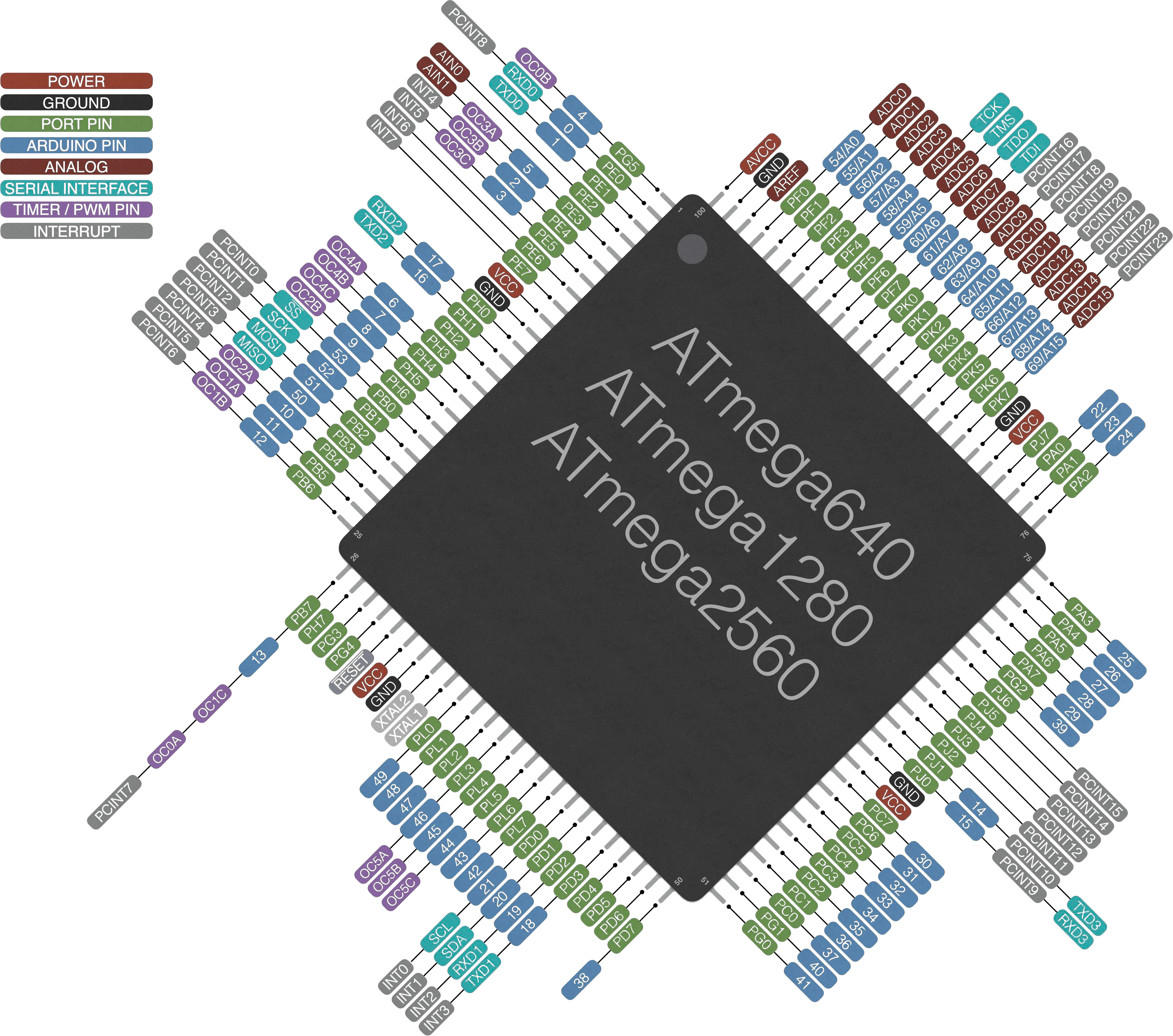{kind=link}
Each bit of the DDRx register represents the IO of each pin where 1 represents output and 0 for input.
PORTC = 0x00;
Similarly, DDRB = 0b01111100; represent pin 9, 10, 11, 12, 13 as output
Reading a port
S0 = digitalRead(A0);
S1 = digitalRead(A1);
S2 = digitalRead(A2);
S3 = digitalRead(A3);
S4 = digitalRead(A4);
S5 = digitalRead(A5);
TO do this simply
sensors = PORTC;
As we know digitalRead() can read value as HIGH or LOW which is the state of that pin using PORTn we can do the same work in one step. PORTn register holds 8bit data which is A0-A5, Reset and last bit is don’t care.
Using bit manipulation on that register, we can do more efficient calculations in less memory and time.
like to get A4, A5 we have to bit shift like this (PORTC & 0b00011000) >> 3 or (PORTC & 0x18) >> 3.
considering the track value (in case of inverted track) ((PORTC^TRACK) & 0x18) >> 3.
Pin Change Interrupt (PCINT)
In Arduino UNO and mega approximately all port have PCINT. It is a special kind of interrupt trigger when any selected pin of that port change. This interrupt applies to the port, unlike other external interrupts.
A0-A5 comes on PCINT1 as it is in PORTC
// Setting pin mask for all pin change detection. you can change it as per sensor count.
PCMSK1 = 0xFF;
// Pin change interrupt control register
PCICR = PCIE1;
// Accept external interrupt
sei();
The above line of code setup pin change interrupt on PORTC. Now we have to define ISR(Interrupt Service Routine)
// ISR can be overloaded by any external interrupt
// PCINT1_vect passes when PCINT1 (PORTC) trigger.
ISR(PCINT1_vect){
// Code to read the sensor
// Do not perform any big calculation
// an interrupt signal can stop other executing tasks
}
Congratulations, we applied in optimization on your bot Thank You. If you want to support me, star, fork or pull this